 The Green Robotics Age
The Green Robotics AgeArticolo
Robot Cacciatore categoria BEAM
Domenico Mancini
Roma 6-2-2005 (Rev.12-2-2005)
Domenico Mancini
Roma 6-2-2005 (Rev.12-2-2005)
Introduzione
In questo scritto vi presento il progetto, in realtà non molto dettagliato ma sufficiente, di un robot cacciatore di palline presentato alla robofesta di Pisa del 15 gennaio 2005. Il robot ha la caratteristica di cercare in modo random le palline nel campo di gara (vedi sezione Regolamento) e, una volta trovata, la ingloba nel telaio trasportandola fino al luogo di raccolta. A questo punto la rilascia, indietreggia e torna alla ricerca di un'altra pallina. Al momento non è presente la sezione ottica di tracking e tutto è fatto usando sensori meccanici.
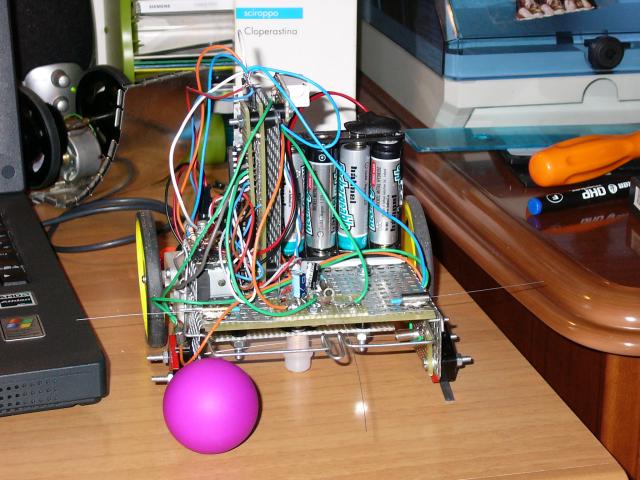 |
| Fig.1
- Si possono vedere i tre sensori di navigazione, uno dei due sensori
della zona raccolta ed in basso dentro il robot in posizione
orizzontale, il sensore per la pallina. Si vede anche il secondo vano
batterie per l'alimentazione del solenoide. |
Caratteristiche
Telaio in lamiera metallica forata (catalogo Opitec) con circuito stampato millefori portante.
Motoriduttori standard (catalogo Solarbotics) con ruote da 65mm.
Due Superneuroni .
Driver motori a relè.
Logica di aggancio/sgancio della pallina a porte logiche della sezione Dima Ottica.
Attuatore di sgancio meccanico a solenoide prelevato da un VCR Philips rotto.
Sensori meccanici dei bordi a cilindro di ottone e corda di chitarra (mi cantino)
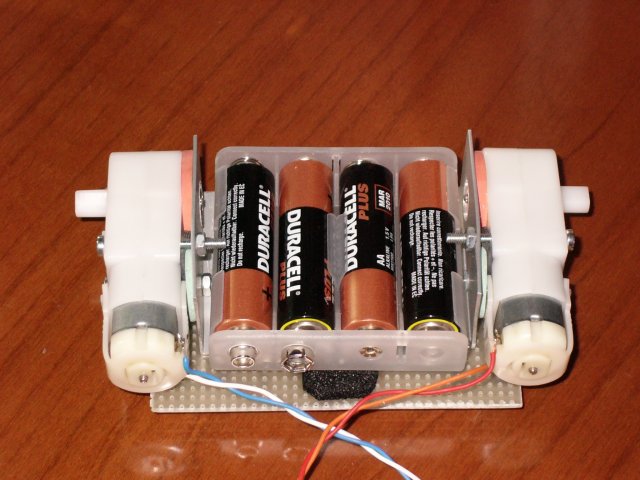 |
| Fig.2
- La basetta millefori con montati i motoriduttori ed il primo vano
batterie che alimenta motori e circuiti. |
Componenti attivi
2 Superneuroni (vedi sezione su questo sito)
1 transistor 2N2222
1 SN74S11
1 SN74LS08
1 SN7400
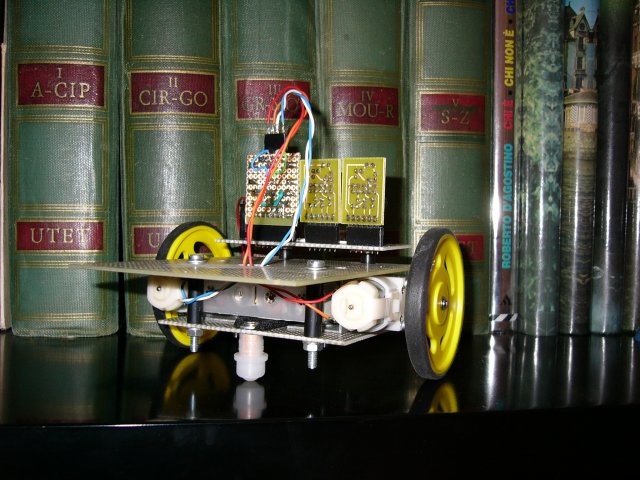 |
| Fig.3
- Il robot parzialmente montato. Si può notare il ballcaster
anteriore e, in sequenza montati in verticale, lo stadio di potenza ed
i due Superneuroni. |
Funzionamento
Il robot in questo stadio è completamente cieco, quindi non prevede una funzione attiva per la ricerca ed il tracking dell'obiettivo ma dispone di tre sensori meccanici per la rilevazione dell'ostacolo più un sensore di rilevamento dell'avvenuta cattura della pallina e due sensori meccanici per la rilevazione del settore di raccolta.
I motori non vanno alla stessa velocità permettendo così un movimento leggermente cicloidale che permette una ricerca randomica delle palline. Se così non fosse il robot non farebbe altro che andare avanti e indietro lungo l'asse di partenza. Il robot va così alla ricerca delle palline evitando gli ostacoli con una rotazione vicina a 90° attivata da uno dei sensori laterali. Gli angoli di sterzata sono determinati dalla capacità applicata ai Superneuroni e non sono eguali. La sterzata si attua invertendo il senso di rotazione della ruota. Un Superneurone determina una sterzata di almeno 45° mentre l'altro determina una sterzata superiore di almeno 30°. Questo perchè il sensore dell'ostacolo frontale attiva entrambi i sensori laterali determinando l'arretramento del robot che con una ruota arretrerà per un tempo T1, con l'altro arretrerà per un tempo T2. Il tempo di sterzata è dato da T1-T2.
Quando la pallina entra del corpo del robot, un sensore meccanico rivelerà la sua presenza ed azionerà il dispositivo di aggancio che chiuderà lo sportellino anteriore impedendo così la fuoriuscita della pallina dal corpo del robot che continuerà il suo vagabondare all'interno del campo. Una volta arrivato sulla zona di raccolta, due sensori inferiori individueranno lo scalino del bordo aprendo lo sportellino anteriore che permetterà la fuoriuscita delle palline nel settire di raccolta. Gli stessi sensori daranno il comando di arretramento sullo stesso ingresso del sensore anteriore permettendo al robot di disimpegnarsi e continuare la ricerca delle palline.
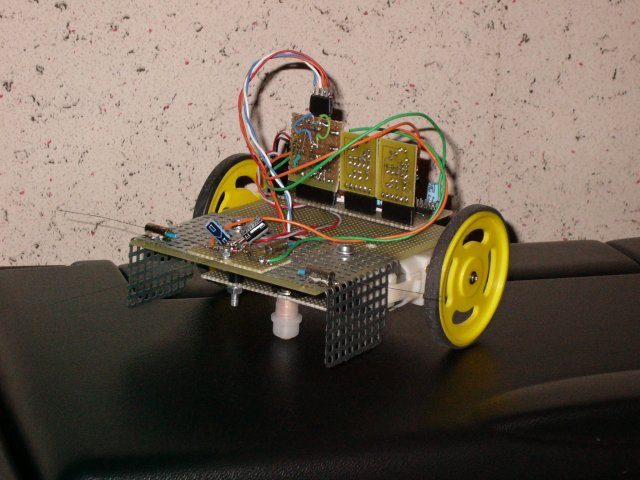 |
| Fig.4
- In questa foto si possono notare i baffi laterali con due
condensatori aggiuntivi di temporizzazione. |
Schema elettrico
 |
| Fig.5 - Lo schema elettrico
completo della sezione ottica non implementata. |
Particolari del meccanismo dello sportellino
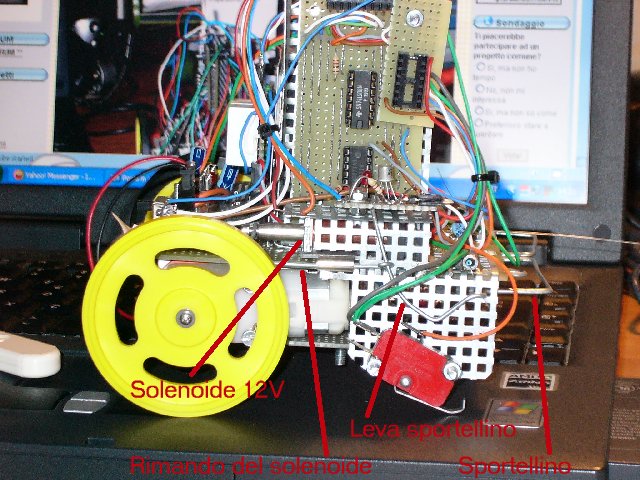 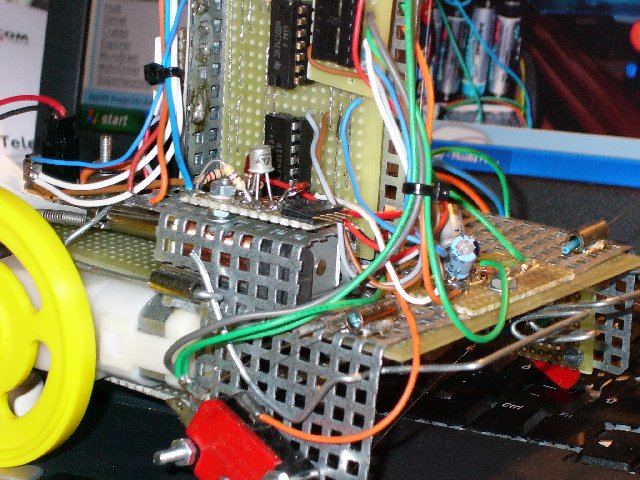  |
| Fig.6 - Tre fotografie dove si
vede il meccanismo dello sportellino e del sistema a leva che trasforma
il movimento lineare del solenoide in movimento angolare. Niente di
nuovo sotto il sole ma solo i ricordi dei giocattoli meccanici
giapponesi della mia infanzia (1968) che prontamente smontavo per
vedere come erano fatti. |
![]()





















Top Ten
wall-G
cosasonoidatasheet
cora
cacciatore1
beaminpillole
teoservi
milsemillimetri
identificazionedeitransistor
greyWalter
servolin








